§4. Combat Manual

§4-1. レーダーモード
BMSにおける戦闘は、まさに現代ジェット戦闘機による戦闘そのものです。特に対航空機戦闘においては、某シューティングゲームのように敵が自ら突っ込んできて、勝手にレーダーロックしてくれることはありません。生き残るためには、自ら索敵して敵をいち早く発見し、敵に見つかるよりも前に攻撃を加えることが必要になります。
F-16には、この現代航空機戦闘を優位に進めるための、非常に優秀なAN/APG-68というレーダーを備えています。ここでは、F-16の各種兵装による攻撃方法を学ぶ前に、レーダーの使用方法について説明していきたいと思います。
1) 対空レーダー
対空レーダーは、ナビゲーションモード(Navigation Mode、以下 NAVモード)または、対空モード(Air to Air)で使用することができます。対空モードにはICPパネルにあるA-A(Air to Air)ボタンを押すことで切り替えることができます。また、もう一度A-Aボタンを押すと、NAVモードに切り替わります。
対空レーダーには2つのマスターモード、CRM(Combined Radar Mode:統合レーダーモード)とACM(Air Combat Mode:格闘戦モード)があります。通常はCRMモードで起動しますが、スティックのmode switchをドッグファイトモード(Dogfight Mode/以下 DGFモード)に切り替えることで、レーダーモードがACMに変わります。また、それぞれのマスターモードには、機能の異なるいくつかのサブモードがあります。
CRMのサブモードは、RWS(Range While Search:測距/捜索)モード、TWS(Track While Scan:追尾/走査)モード、VSR(Velocity Search with Ranging:測距/速度捜索)モード及びVLSモードの4つです。

ACMのサブモードは、HUD走査(ACM 30×20モード)モード、垂直走査(ACM 10×60)モード、ボアサイト走査(BORE 3.3×4.6モード)及びスルー走査(ACM 60×20)モードです。

レーダーを効果的に利用できるようになるためには、これらのマスターモードとサブモードを明確に理解する必要があります。詳しい説明は次項に譲りますが、2つのマスターモードの使い分けは、視程距離外(BVR:Beyond Visual Range)目標に対する戦闘時はCRM、視程距離内(WVR:Within Visual Range)目標との戦闘時はACMと考えておけば、近からず遠からずです。
マスターモードとサブモードを整理したものが、下記の図になります。
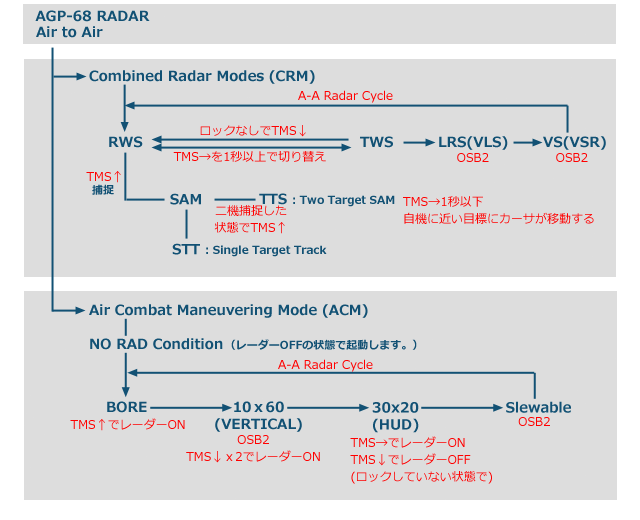
『Avionic Checklists.pdf』 P.16
上図に示しましたように、各サブモードへの切り替えや敵機の捕捉は主にスティックのTMS〔POV Hat 2〕を使用します。また、サブモードの切り替えについてはスロットルに配置している A-A Radar Cycle〔POV Hat 2 ←〕で切り替えることができます。